Cognitive Adaptation of Modulation for Improving Noise Resistance of a Tropospheric UAV Channel
V. Kharchenko , A. Grekhov* and V. Kondratiuk
, A. Grekhov* and V. Kondratiuk
Research Training Center "Aerospace Center", State University "Kyiv Aviation Institute", Kyiv, Ukraine
Submitted on 17 September 2025; Accepted on 28 February 2026; Published on 18 March 2026
To cite this article: V. Kharchenko, A. Grekhov and V. Kondratiuk, “Cognitive Adaptation of Modulation for Improving Noise Resistance of a Tropospheric UAV Channel,” Trans. Appl. Sci. Eng. Technol., vol. 2, no. 1, pp. 1-8, 2026.
Copyright: 
Abstract
In modern operational conditions of unmanned aerial vehicles (UAVs), the stability and reliability of communication channels are becoming key factors in the successful completion of missions. Operation in a dynamically changing radio environment, including the influence of natural interference and electronic warfare (EW), is especially relevant. Traditional communication systems with a fixed modulation scheme cannot effectively respond to changes in channel parameters, such as signal level, signal-to-noise ratio (SNR), and the presence of interference. This leads either to excessive errors (with excessive modulation) or to an unjustified loss of throughput (with increased reliability under good conditions). One of the key areas for improving noise immunity is the cognitive adaptation of modulation. To study the influence of cognitive adaptation on noise immunity in the UAV communication channel, an original model, “Base Station-Tropospheric Drone-UAV,” was built using the MATLAB Simulink software. The dependences of the SNR ratio on the Free Space Path Loss (FSPL) for different types of signal modulation and noise temperatures were obtained. The calculated interrelated sequences of FSPL, SNR, and modulation were used to adapt the modulation in accordance with changing transmission conditions. The model was trained on the obtained data and then used for modulation adaptation. Python code is given that uses the Random Forest Classifier model to predict the modulation type.
Keywords: UAV; interference-proof; relay; tropospheric drone; cognitive adaptation; MATLAB Simulink
Abbreviations: UAVs: unmanned aerial vehicles; EW: electronic warfare; SNR: signal-to-noise ratio; FSPL: Free Space Path Loss; BER: bit error rate; HAPs: high altitude platforms; AI: artificial intelligence; RL: reinforcement learning; DNN: deep neural networks; AMR: automatic modulation recognition; DL: deep learning; CSI: channel state information; CR: cognitive radio; DRL: deep reinforcement learning; AMC: automatic modulation classification; ULNN: ultra-lightweight neural network; VANET: vehicular ad-hoc network; SURF: Speeded-Up Robust Features; OFDM: orthogonal frequency division multiplexing; MIMO: multiple-input multiple-output
1. Introduction
Modern unmanned aerial vehicles (UAVs) perform a wide range of tasks in conditions that require high reliability and stability of communication channels [1–3]. In particular, in military, search and rescue, reconnaissance, and monitoring missions, UAVs operate in an aggressive radio environment with dynamic noise, natural and intentional interference, multipath fading, as well as with the impact of electronic warfare (EW). Maintaining stable communication in such conditions requires the implementation of intelligent, adaptive mechanisms for controlling data transmission parameters, primarily modulation [4, 5].
Cognitive adaptation of modulation is relevant and significant. Adaptive modulation schemes, in particular those using cognitive algorithms, allow changing the modulation type (BPSK, QPSK, 16-QAM, 64-QAM, etc.) in real time depending on parameters such as signal level, signal-to-noise ratio (SNR), Free Space Path Loss (FSPL), and the current bit error rate (BER). In tropospheric channel conditions, where there is a high degree of attenuation and signal instability, cognitive adaptation becomes particularly effective [6–8].
Implementation of such solutions provides an increase in channel capacity due to the use of more efficient modulation schemes and a decrease in the error rate during channel quality degradation due to the transition to more robust modulation schemes [9].
Tropospheric communication channels of UAVs, characterized by long-range propagation and subject to multipath fading, weather changes, and interference, require reliable mechanisms that are resistant to interference [6]. Traditional fixed modulation schemes are often insufficient in such changing conditions. Cognitive radio and adaptive modulation systems controlled by real-time sensing and learning mechanisms allow UAVs to dynamically adjust communication parameters based on feedback from the environment. A review by Santana et al. [4] highlights the potential of cognitive radio techniques for UAVs. Adaptive modulation integrated with cognitive frameworks allows UAVs to select optimal modulation levels in response to channel quality metrics such as SNR and BER.
Tropospheric propagation used in UAV relay networks or high altitude platforms (HAPs) involves signal transmission through the lower atmosphere, which results in fading, scattering, and interference from various sources [6]. The main challenges include dynamic SNR variations due to distance and weather, multipath propagation, fading effects, and interference. Under such conditions, static modulation results in either suboptimal throughput or excessive BER. A modulation scheme that adapts based on the current FSPL and SNR is needed.
Recent approaches in artificial intelligence (AI) and decision-making use machine learning and reinforcement learning (RL) to perform modulation classification, channel estimation, and adaptive switching [10]. These models can be trained on labeled datasets of FSPL, SNR, BER, and modulation types and deployed onboard UAVs with low-latency inference capabilities. Popular AI models for cognitive modulation include Random Forest Classifier for low-complexity, real-time decision-making, deep neural networks (DNN) for complex, nonlinear mapping, and Q-learning for self-adaptive strategies in unknown environments.
The contribution and novelty of our research lies in the interdisciplinary approach to solving one of the key problems of modern unmanned aerial interactions - ensuring interference-resistant data transmission in the conditions of electronic countermeasures and an unstable radio environment. We used radio engineering to model channel loss, SNR, and tropospheric coupling characteristics. Communication theory was used to select modulation schemes and calculate noise immunity. Programming consisted of implementing models in MATLAB and Python. Machine learning was used to train a classification model (Random Forest Classifier) for modulation adaptation. In addition, systems engineering combined everything into a single simulation platform.
The main elements of scientific novelty include the following. Unlike traditional fixed or threshold modulation schemes, this work implements an approach in which the choice of a modulation scheme is made dynamically, based on current channel conditions. Machine learning (Random Forest Classifier) is used, which allows adapting the modulation more accurately and quickly than when using fixed correspondence tables.
An original simulation model has been developed in MATLAB Simulink, reflecting the features of a real communication channel using a tropospheric repeater. This allows us to study the effect of free space losses, noise levels, different types of modulation, and transmission errors.
The integration of modeling in MATLAB with machine learning in Python was implemented. The physical channel parameters obtained from Simulink were combined with analytical methods in Python. This allowed us to build a training sample including dependencies between FSPL, SNR and modulation, apply a Random Forest Classifier to classify modulation based on channel input data, and predict modulation for new values that were not included in the training sample.
The rest of the paper is organized as follows. Section 2 considers related works. Section 3 describes the tropospheric channel model and presents results. Section 4 considers cognitive adaptation of modulation. Section 5 provides conclusions.
2. Related Works
The aim of the paper by Xiao et al. [10] is to generalize the related algorithms for the combination of automatic modulation recognition (AMR) technology and deep learning (DL) technology in the physical layer of communication. The advantages of the modulation recognition algorithm based on DL are discussed. The traditional AMR method is presented, and the application of the DL algorithm in AMR is described. An identification method based on a typical DL network is presented. The existing DL modulation identification algorithm in a small sample environment is summarized. The problems in this area and future research directions are identified.
In the paper by Khan et al. [11], adaptive modulation is used under different SINR and link distance to minimize BER, improve throughput, and efficiently utilize the available bandwidth. The effects of additive white Gaussian noise, Rayleigh and Rice fading channels on the performance of different modulation schemes are studied. The simulation results show that our proposed technique optimally improves BER and spectral efficiency in long-range communication compared to fixed modulation schemes under adjacent channel interference from surrounding base stations. The results show that the performance of fixed modulation schemes is suitable only under either high SINR and short distance or low SINR and long distance.
Millimeter-wave UAVs face the problem of the Doppler effect, and the rapidly changing channel with the ground over time may result in outdated channel state information (CSI) from the channel estimate. In the paper by Yang et al. [12], two detectors are presented to demodulate the received signal and obtain the instantaneous BER in the UAV link. Based on the developed detectors, an adaptive modulation scheme is proposed to maximize the average transmission rate under imperfect CSI by optimizing the data transmission time, considering the maximum allowable BER. Power control is combined with adaptive modulation to minimize the transmission power while maintaining both the BER below the threshold and the maximum average transmission rate. Numerical results show that the proposed adaptive modulation scheme can maximize the time-averaged transmission rate while saving up to 50% of the energy.
The paper by Zhou et al. [13] presents an overview of intelligent jamming defense methods. The concept and characteristics of intelligent jamming capabilities are defined. The initial design of the architecture of an intelligent jamming defense system is presented. The development of intelligent jamming is discussed, and the progress from early adaptive jamming defense methods to more recent achievements based on game theory and machine learning is traced.
The aim of the study by Rahmayanti [14] is to analyze a modulation scheme that can intelligently select a suitable modulation model to achieve high SNR and throughput efficiency in wireless networks using a DNN approach. The AI-driven Python simulations on BPSK, QPSK, 16-QAM, and 64-QAM modulation are used to determine the SNR and QoS obtained by both traditional approaches and the DNN. It is concluded that the AI-driven system using a DNN can dynamically adapt to determine the modulation model according to the user's environment, improve spectrum efficiency and throughput, and increase the SNR, which can automatically improve the network utilization efficiency.
In the paper by Zhang et al. [15], a mobile swarm relay UAV architecture is presented that extends the coverage area of the ground base station and increases the throughput. A swarm of drones designed to probe and collect data using cameras and/or sensors installed on them uses a powerful relay UAV to transmit data to the ground. A genetic algorithm (?-MOGA) is used to maximize the delivered data and minimize latency. The simulation results show that the proposed mobile relay is capable of delivering more data.
The study by Yan et al. [16] considers an agile cognitive radio (CR) system based on spectral availability technology, which enables secondary networks to efficiently utilize idle spectrum resources for information transmission by actively sensing the spectrum usage of primary networks. It is proposed to introduce drone technology into the CR system to enhance its adaptability, which ensures the transmission efficiency of UAV networks at low altitudes. Maximizing the average transmission rate is achieved by jointly optimizing secondary UAV trajectories, primary UAV trajectories, secondary UAV beamforming, sub-channel allocation, and sensing time. For this purpose, deep reinforcement learning (DRL) algorithms are used to optimize these variables. To solve the problem, the Dueling DQN-Soft Actor Critic algorithm is proposed. The simulation results show that the proposed approach significantly improves the performance of the CR system compared with traditional baseline schemes. The study combines drone technology and DRL algorithms, bringing new possibilities for the future development of cognitive communication systems.
Existing DL-based automatic modulation classification (AMC) methods cannot be directly applied to the UAV platform with limited computing power and memory. In the paper by Wang et al. [17], lightweight DL-based AMC networks are studied to improve adaptivity in resource-constrained cases. To solve this problem, an ultra-lightweight neural network (ULNN) is proposed. The experimental results show that ULNN can achieve high recognition accuracy while maintaining the lightweight nature of the model, and is suitable for the UAV platform with limited resources.
In the paper by Raza et al. [18], cognitive radio technology is implemented in a drone-enabled vehicular ad-hoc network (VANET). The model uses licensed spectrum without interfering with the primary user and relies on line-of-sight communication between drones and vehicles. The Speeded-Up Robust Features (SURF) channel selection strategy is applied to determine the most suitable channel from the available options. SURF selects the channel based on the primary user activity and the number of cognitive users. The results show that SURF outperforms other methods in terms of delivery ratio and interference to the primary user.
The paper by Davey et al. [19] uses multi-task learning and develops a branching architecture for an autoencoder with a tunable algorithm to train the transmitter and receiver for adaptive modulation and coding. The paper demonstrates improvements in block error rate over traditional methods in an additive white Gaussian noise channel and analyzes the performance of the model in Rayleigh fading channels. The results of the study extend end-to-end learning approaches to the design of adaptive wireless communication systems.
In the paper by Manzoor et al. [20], time-domain and frequency-domain SNR estimation algorithms are presented that use a modified constant-amplitude zero-autocorrelation synchronization preamble. These SNR estimators are invoked in an orthogonal frequency division multiplexing (OFDM) system using multiple-input multiple-output (MIMO) block coding. These SNR estimators are compared with a reference SNR estimator based on the frequency-domain preamble.
3. Description of UAV Tropospheric Channel Model
The tropospheric communication channel was analyzed using an original model designed on the basis of the IEEE 802.11a standard and the MATLAB Simulink demo model commwman80211a. The model (Figure 1) consists of a “base station” transmitter (Figure 2), “uplink/downlink”, “tropospheric drone” transponder, “UAV” receiver (Figure 3), and “adaptive modulation control”. This paper is devoted to the consideration of a “free path loss with phase/frequency offset” type of link.
Parameter settings for the model are the following: Viterbi traceback depth is 34, hysteresis factor for adaptive modulation (dB) is 3, number of OFDM symbols per transmit block is 20, 200, 400, and 1000, number of OFDM symbols in training sequence is 4, low-SNR thresholds (dB) vector is [10 11 14 18 22 26 28].
In the communication channel of this model, random data is generated at a bit rate that varies during the simulation. The data is then encoded and modulated using one of eight schemes specified in the standard. OFDM data transmission is performed using 52 subcarriers, 4 pilot signals, 64-point fast Fourier transforms, and a 16-sample cyclic prefix.
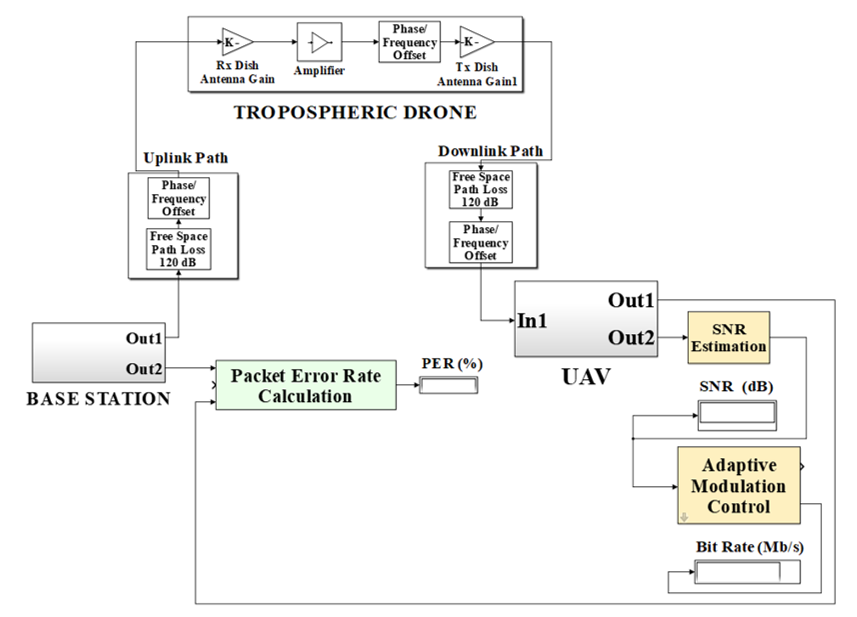
FIGURE 1: “Base Station-Tropospheric Drone-UAV” channel.

FIGURE 2: “Base Station” transmitter.

FIGURE 3: “UAV” receiver.
The data rate is selected based on the SNR estimation, which determines the choice of modulation scheme and convolutional code. The highest throughput mode that achieves the desired (zero) packet error rate is used. To determine the appropriate thresholds, the simulation is often run multiple times, changing the values of the low SNR threshold parameter. The packet error rate calculator shows the packet error rate as a percentage and should always be zero during the studies.
The phase/frequency offsets in the uplink/downlink and tropospheric drone were assumed to be zero. The tropospheric drone amplifier had a linear gain of 10 dB. The relationship between the antenna gain K, the antenna diameter D, and the wavelength is determined by the relation K = η?(πD/λ)2, where η is the antenna efficiency. The following model parameters were set: η = 1, the gain factors of the antennas of the tropospheric drone and UAV were taken to be 1.55 (antenna diameter ≈ 0.2 m at a frequency of 1 GHz), the gain factor of the base station transmitter antenna (Figure 2) was taken to be 7.8 (antenna diameter ≈ 1.0 m at a frequency of 1 GHz).
The dependence of SNR on free space loss for different modulation modes and noise temperatures is shown in Figure 4. During the simulation, the packet error rate was maintained at zero by changing the modulation type (using SNR estimation and adaptive rate control). SNR was changed accordingly. Free space loss values on the path were changed simultaneously in the uplink and downlink channels.
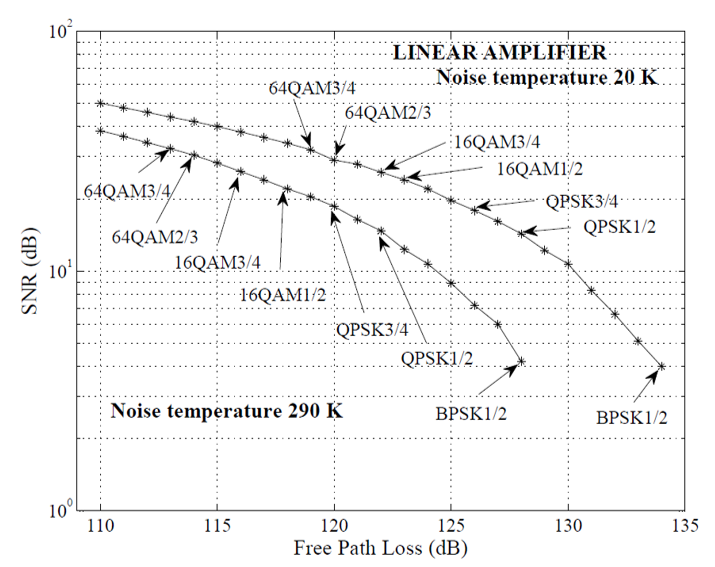
FIGURE 4: SNR dependences on Free Space Path Loss for different modulation modes.
The data in Figure 4 were obtained with the model parameters described above and show what SNR values should be used and which modulation type should be used to transmit error-free packets (PER = 0) for the given FSPL and noise temperature.
For the free space loss values marked with arrows, the modulation type and data rate change: BPSK 1/2 (6 Mbps), QPSK 1/2 (12 Mbps), QPSK 3/4 (18 Mbps), 16QAM 1/2 (24 Mbps), 16QAM 3/4 (36 Mbps), 64QAM 2/3 (48 Mbps), and 64QAM 3/4 (54 Mbps). As can be seen, the noise temperature significantly affects the results.
As follows from the data in Figure 4, the UAV tropospheric communication channels stop working for different free space loss values. For example, at a noise temperature of T = 20 K (290 K), the channels “close” with losses of 134 dB (128 dB). Table 1 summarizes the results obtained, which will be further used for cognitive adaptation of modulation.
TABLE 1: Dependence of SNR on Free Space Path Losses (FSPLs) for different modulation modes.
|
FSPL (dB) |
Modulation |
SNR (dB) |
Bit rate (Mb/s) |
||||
|
Noise temperature |
|||||||
|
20 K |
290 K |
20 K |
290 K |
20 K |
290 K |
20 K |
290 K |
|
136 |
- |
1 |
- |
5 |
- |
6 |
- |
|
135 |
- |
1 |
- |
5.5 |
- |
6 |
- |
|
134 |
- |
1 |
- |
6.7 |
- |
6 |
- |
|
133 |
- |
1 |
- |
7.3 |
- |
6 |
- |
|
132 |
- |
1 |
- |
8.3 |
- |
6 |
- |
|
131 |
- |
1 |
- |
8.9 |
- |
6 |
- |
|
130 |
- |
1 |
- |
9.8 |
- |
6 |
- |
|
129 |
- |
2 |
- |
10.6 |
- |
6 |
- |
|
128 |
- |
2 |
- |
11.7 |
- |
6 |
- |
|
127 |
- |
2 |
- |
12.8 |
- |
9 |
- |
|
126 |
- |
3 |
- |
13.7 |
- |
12 |
- |
|
125 |
- |
4 |
- |
14.4 |
- |
12 |
- |
|
124 |
124 |
4 |
1 |
15.8 |
5.3 |
12 |
6 |
|
123 |
123 |
4 |
1 |
16.7 |
5.9 |
12 |
6 |
|
122 |
122 |
4 |
1 |
17.5 |
6.8 |
18 |
6 |
|
121 |
121 |
4 |
1 |
18.8 |
7.7 |
18 |
6 |
|
120 |
120 |
4 |
1 |
19.2 |
8.3 |
18 |
6 |
|
119 |
119 |
5 |
1 |
20.3 |
9.4 |
24 |
6 |
|
118 |
118 |
5 |
1 |
21.7 |
10.06 |
24 |
6 |
|
117 |
117 |
5 |
2 |
22.5 |
11.07 |
24 |
6 |
|
116 |
116 |
5 |
2 |
23.5 |
12.5 |
24 |
6 |
|
115 |
115 |
5 |
2 |
24.6 |
13.1 |
24 |
9 |
|
114 |
114 |
6 |
3 |
25.8 |
13.9 |
36 |
12 |
|
113 |
113 |
6 |
3 |
26.7 |
14.9 |
36 |
12 |
|
112 |
112 |
6 |
4 |
27.8 |
16.1 |
36 |
12 |
|
111 |
111 |
7 |
4 |
28.5 |
16.8 |
48 |
18 |
|
110 |
110 |
7 |
4 |
29.2 |
17.6 |
48 |
18 |
|
109 |
109 |
8 |
4 |
30.5 |
18.6 |
54 |
18 |
|
108 |
108 |
8 |
4 |
31.5 |
19.6 |
54 |
18 |
|
|
107 |
|
5 |
|
20.9 |
|
24 |
|
|
106 |
|
5 |
|
22.0 |
|
24 |
|
|
105 |
|
5 |
|
23.2 |
|
24 |
|
|
104 |
|
5 |
|
23.9 |
|
24 |
|
|
103 |
|
6 |
|
24.6 |
|
36 |
|
|
102 |
|
6 |
|
25.9 |
|
36 |
|
|
101 |
|
6 |
|
26.8 |
|
36 |
|
|
100 |
|
6 |
|
27.6 |
|
36 |
|
|
99 |
|
7 |
|
29.0 |
|
48 |
|
|
98 |
|
7 |
|
29.8 |
|
48 |
|
|
97 |
|
8 |
|
30.9 |
|
54 |
|
|
96 |
|
8 |
|
32.2 |
|
54 |
Notes: 1 - BPSK 1/2, 2 - BPSK 3/4, 3 - QPSK 1/2, 4 - QPSK 3/4, 5 - 16-QAM 1/2, 6 - 16-QAM 3/4, 7 - 64-QAM 2/3, 8 - 64-QAM 3/4: a number of OFDM symbols per transmited block is 1000; PER=0; phase/frequency offset is 0; satellite linear amplifier gain is 1; all antennas gain is 1.
4. Cognitive Adaptation of Modulation
Cognitive adaptation refers to the ability of a system to adapt its functioning or performance characteristics in response to changes in the internal state or external environment based on encoded knowledge. Many existing methods cannot be directly applied to the UAV platform with limited computing power and small memory due to the contradiction between accuracy and efficiency. For the future development of cognitive communication systems to improve adaptability in resource-limited scenarios, we propose the following scheme for cognitive adaptation of signal modulation.
From the simulation data shown in Figure 4 and Table 1, it follows that changing the data transmission conditions in the upstream and downstream channels leads to an increase or decrease in the free space loss FSPL. These changes are reflected in the SNR values in the channel (Figure 1), which determine the current modulation in the channel. In fact, there are three step-by-step interconnected sequences of FSPL, SNR, and modulation, which can be used to adapt the modulation in accordance with changing transmission conditions. In this case, we will use the calculated dependencies, and in reality, the UAV can use the SNR values in the channel and adapt the modulation type accordingly.
At the first stage, we will create the program code that will simulate the change in FSPL, SNR, and modulation during data transmission, starting from the value of FSPL = 136 dB, which will decrease by 1 dB every minute. The text of the program is given in Supplementary Appendix 1, and the result of its operation is shown in Figures 5–7.
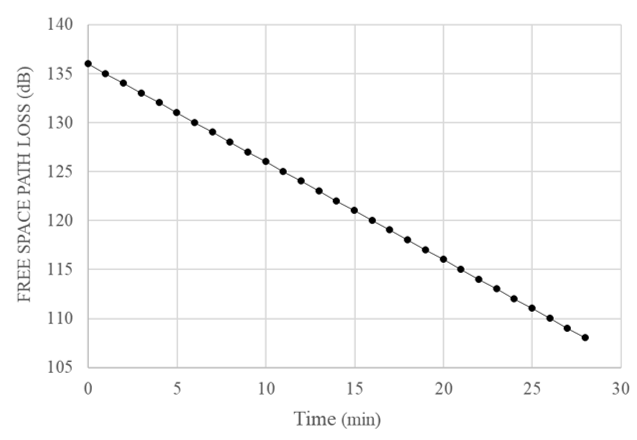
FIGURE 5: Dependence of FSPL on time.
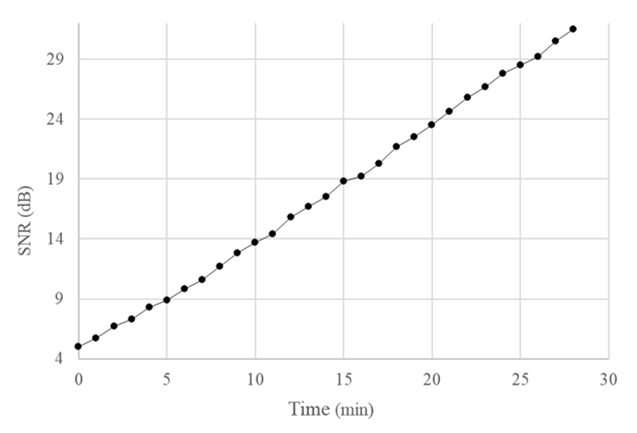
FIGURE 6: Dependence of SNR on time.

FIGURE 7: Dependence of MODULATION on time.
At the second stage, we will implement cognitive adaptation of the modulation using the information about changes in the internal state (SNR) and external environment (FSPL) stored in the UAV memory based on the obtained data (Figure 4 and Table 1).
We create and train a model to predict the MODULATION value based on the specified FSPL values, which simulate real changes in conditions in the upstream and downstream channels. The corresponding Python code is given in Supplementary Appendix 2. A Random Forest Classifier is used, which guarantees integer predictions of MODULATION classes and eliminates the need for rounding. The classification model fits better because MODULATION is a categorical parameter.
As an example, when transmitting data, the FSPL values will change every minute as follows: FSPL = [129 128 127 126 125 125 114 111 109 108 119 118 126 129 136 135 134] dB. Using the trained model, we find the corresponding MODULATION values (Figure 8).

FIGURE 8: Dependence of MODULATION on time.
5. Conclusion
This study is a contribution to the field of increasing the noise immunity of UAV communication channels in unstable radio environments and active electronic countermeasures. The main novelty lies in the use of an interdisciplinary approach that combines radio engineering modeling, communication theory, programming, machine learning, and systems engineering.
Unlike traditional schemes with fixed modulation or simple threshold transitions, the proposed approach involves cognitive adaptation of modulation in real time. The use of machine learning provides a more accurate and flexible choice of modulation adapted to current channel conditions, which minimizes the number of errors and increases channel capacity without losing stability.
The developed original model in MATLAB Simulink with a tropospheric repeater made it possible to study the effect of free space losses, modulation types, and noise temperature on channel characteristics. Synchronous data processing in Python made it possible to form a training sample and test the model.
The conducted study allows us to conclude that cognitive adaptation of modulation significantly improves channel noise immunity, especially when operating in conditions of variable signal levels and EW. Using the Random Forest algorithm allows for modulation classification with high accuracy and minimal delays, which is important for UAVs in real time. The integration of MATLAB Simulink and Python expands the capabilities of simulation modeling and allows for an effective combination of a physical channel model with intelligent adaptation. The proposed architecture can be the basis for building intelligent UAV radio systems capable of autonomously controlling transmission parameters depending on the environment.
The practical application in autonomous systems is that the developed approach can be integrated into communication systems of autonomous UAVs and drone swarms, emergency communications, military and reconnaissance missions, where fast and reliable data transmission is important in conditions of severe electronic pressure.
Further research will focus on federated learning for distributed UAV swarms, taking into account real atmospheric conditions and integration with 6G communication architectures.
Funding
The authors declare that no funds, grants, or other support were received during the preparation of this manuscript.
Competing Interests
The authors have no relevant financial or non-financial interests to disclose.
Conflicts of Interest
The authors declare no conflict of interest.
Author Contributions
Conceptualization: A. Grekhov and V. Kharchenko; Methodology: A. Grekhov; Validation: A. Grekhov, V. Kharchenko, and V. Kondratiuk; Investigation: A. Grekhov; Resources: V. Kharchenko and V. Kondratiuk; Writing - original draft preparation: A. Grekhov; Writing -review and editing: V. Kondratiuk; Supervision: V. Kharchenko; Project Administration: V. Kondratiuk. All authors have read and agreed to the published version of the manuscript.
Ethics Approval
Not applicable.
Data Availability Statement
All data generated and analyzed during this study are included in this article. The datasets generated during the current study are available from the corresponding author on request.
Supplementary Material
The supplementary material for this article can be found online at: https://lanashscience.com/Supplementary-Material-UKRN.pdf
References
- F. A. Turjman and H. Zahmatkesh, “A Comprehensive Review on the Use of AI in UAV Communications: Enabling Technologies, Applications, and Challenges,” in Unmanned Aerial Vehicles in Smart Cities, Cham: Springer, 2020, pp. 1-26.
- M. A. Lahmeri, M. A. Kishk and M. S. Alouini, “Artificial Intelligence for UAV-Enabled Wireless Networks: A Survey,” IEEE Open J Commun Soc, vol. 2, pp. 1015-1040, 2021.
- H. Nawaz, H. M. Ali and A. A. Laghari, “UAV Communication Networks Issues: A Review,” Arch Computat Methods Eng, vol. 28, pp. 1349-1369, Mar 2020.
- G. M. D. Santana, R. S. D. Cristo and K. R. L. J. C. Branco, “Integrating Cognitive Radio with Unmanned Aerial Vehicles: An Overview,” Sensors, vol. 21, no. 3, pp. 803, 2021.
- N. I. Sarkar and S. Gul, “Artificial Intelligence-Based Autonomous UAV Networks: A Survey,” Drones, vol. 7, no. 5, pp. 322, 2023.
- V. Kharchenko, A. Grekhov and V. Kondratiuk, “Traffic modelling in stratospheric drone-assisted VANET,” Peer-to-Peer Netw Appl, vol. 17, pp. 1138–1148, Feb 2024.
- V. Kharchenko, A. Grekhov and V. Kondratiuk, “Studying data loss, nonlinearity, and modulation effects in drone swarm channels with artificial intelligence,” Telecommun Syst, vol. 87, pp. 743–758, 2024.
- G. Pan, X. Miao, X. Yang and Z. Yang, “Introduction to UAV Communications,” in UAV Commun.: Model. Anal, Singapore: Springer, 2024, pp. 1-21.
- R. Xue, M. Zhao and H. Tang, "Information Transmission Schemes Based on Adaptive Coded Modulation for UAV Surveillance Systems with Satellite Relays," IEEE Access, vol. 8, pp. 191355-191364, 2020.
- W. Xiao, Z. Luo and Q. Hu, “A Review of Research on Signal Modulation Recognition Based on Deep Learning,” Electronics, vol. 11, no. 17, pp. 2764, Sep 2022.
- R. Khan, Q. Yang, A. Noor, S. B. A. Khattak, L. Guo and A. T. Tufail. “An efficient adaptive modulation technique over realistic wireless communication channels based on distance and SINR,” Frequenz, vol. 76, no. 1-2, pp. 83-95, 2022.
- S. Yang, Z. Zhang, J. Zhang, X. Chu and J. Zhang, “Adaptive Modulation for Wobbling UAV Air-to-Ground Links in Millimeter-wave Bands,” vol. 10, no. 10, 2020.
- Q. Zhou and Y. Niu, “From Adaptive Communication Anti-Jamming to Intelligent Communication Anti-Jamming: 50 Years of Evolution,” Adv Intell Syst, vol. 6, no. 8, pp. 1-22, Aug 2024.
- D. Rahmayanti, “Analysis of AI-Driven Modulation for Cognitive Cellular Networks: DNN Approach,” IJMECIE, vol. 1, no. 4, Oct 2024.
- J. Zhang, S. Chen, W. K. Chai and L. Hanzo, "Adaptive Coding and Modulation-Aided Mobile Relaying for Millimeter-Wave Flying Ad Hoc Networks," IEEE Internet Things J, vol. 11, no. 2, pp. 3282-3301, Jan 15.
- L. Yan, Y. Cai and H. Wei, “Unmanned aerial vehicle-assisted wideband cognitive radio network based on DDQN-SAC,” EURASIP J Adv Signal Process, vol. 43, 2024.
- M. Wang, S. Fang, Y. Fan, J. Li, Y. Zhao and Y. Wang, “An ultra lightweight neural network for automatic modulation classification in drone communications,” Sci Rep, vol. 14, 2024.
- A. Raza, Z. Iqbal, F. Aadil, M. A. Khan, S. Kadry and H. M. Albarakati, “Wideband communications through drone-assisted cognitive radio VANETs using SURF channel selection,” Digit Commun Netw, May 2024.
- C. P. Davey, I. Shakeel, R. Deo, E. Sharma, S. Salcedo and J. Soar, “End-to-end learning of adaptive coded modulation schemes for resilient wireless communications,” Appl Soft Comput, vol. 159, July 2024.
- S. Manzoor, N. S. Othman and M. W. Muhieldeen, “Preamble-Based Signal-to-Noise Ratio Estimation for Adaptive Modulation in Space–Time Block Coding-Assisted Multiple-Input Multiple-Output Orthogonal Frequency Division Multiplexing System,” Algorithms, vol. 18, no. 2, pp. 97, 2025.
Contact Us

 This work is licensed under a Creative Commons Attribution 4.0 International License. Copyright © 2026 LANASH SCIENCE Inc, All Rights Reserved.
This work is licensed under a Creative Commons Attribution 4.0 International License. Copyright © 2026 LANASH SCIENCE Inc, All Rights Reserved.